Функционирование на мобильных устройствах в демонстрационной версии не реализовано.
Пожалуйста, воспользуйтесь ПК.
Тренажер-симулятор оператора крано-манипуляторной установки
Основное назначение - демонстрация основных принципов управления КМУ,
получение начальных навыков управления манипулятором в типовых ситуациях, изучение и отработка
оптимальных приемов выполнения грузоподъемных операций, предупреждение аварийных ситуаций.
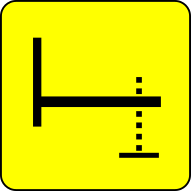
Интерфейс тренажера-симулятора:
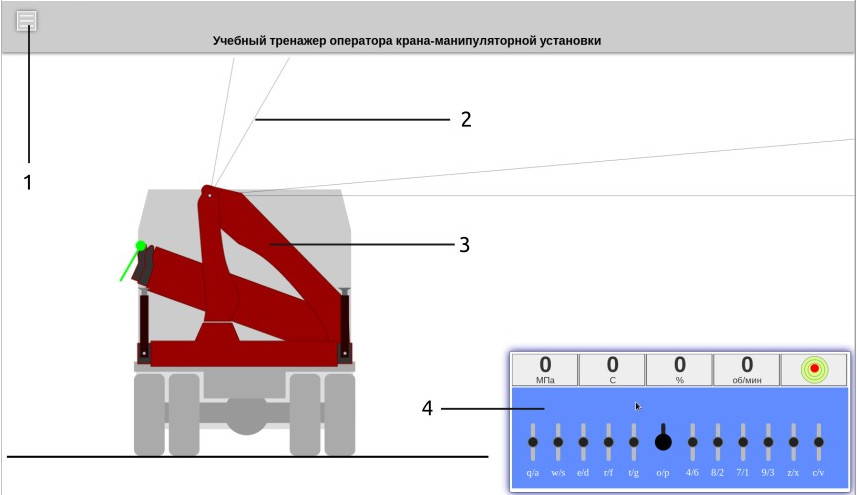
1. Переход к справке
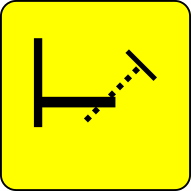
2. Линии-подсказки угла наклона стрелы
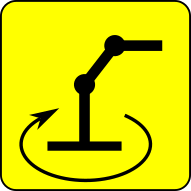
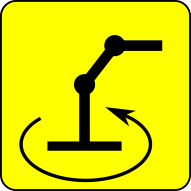
3. Схематичное изображение манипулятора
4. Пульт управления
Краткое описание:
В программе реализовано управление аутригерами, первой и второй стрелой, а также телескопическими секциями.
Функции поворота колонны, управления подвесным оборудованием (грейферы, захваты, лебедка),
а также индикаторы параметров (давление и температура масла, обороты двигателя шасси), перегруза и др.
могут быть реализованы в полнофункциональной версии симулятора.
На фоне изображения КМУ нанесены линии-подсказки, соответствующие уровню горизонта, а также углам
наклона первой стрелы 60 и 80 градусов к уровню горизонта.
Возможно размещение на фоне грузовысотной схемы.
Как управлять симулятором крана-манипулятора:
Управление функциями манипулятора осуществляется с клавиатуры ПК.
Внимание: Порядок и принципы управления виртуальным краном в целом, соответствуют реальному КМУ!!!
Управляющие клавиши в настоящем руководстве отображаются в виде Клавиша.
Перед началом работы проверьте параметры клавиатуры:
- раскладка клавиатуры ENG
- CapsLock - выключен
- NumLock - включен
Отображение команд оператора производится на виртуальной панели, имитирующей основной пульт управления манипулятором.
Управляющие клавиши, соответствующие рычагам пульта, подписаны под рычагом.
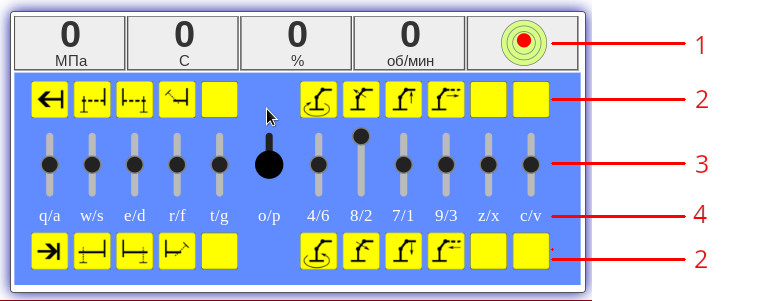
1. Отображение параметров виртуальной КМУ (в демо-версии не подключено)
2. Подсказки по функциям виртуальной КМУ (детальное описание см. ниже)
3. Рычаги пульта управления виртуальной КМУ
4. Подсказки клавиш управления рычагами
Нажатие соответствующей клавиши на клавиатуре, вызывает перемещение (активацию) соответствующего рычага на пульте управления.
Если функция подразумевает переключение, то рычаг остается во включенном состоянии.
Возврат рычага в нейтральное положение производится той же клавишей, что и включение функции.
При нажатии противоположной клавиши - рычаг переключается в требуемое положение.
Если функция не подразумевает фиксацию рычага, то рычаг остается в нужном положении только при удержании клавиши управления.
При отпускании клавиши, рычаг возвращается в нейтральное положение.
Например: в подсказке указаны клавиши 8/2. В данном случае, клавиша 8 активирует соответствующий рычаг вверх, а клавиша 2 - вниз.
Клавиши управления работают исключительно при активном пульте! (для отработки навыка постоянного контроля за своими действиями).
Для активации пульта необходимо кликнуть левой кнопкой мыши в любом месте пульта.
При клике мышью вне пульта, в другом окне и т.п. - пульт деактивируется, управление не работает.
Неактивный пульт отображается в полупрозрачном виде.
Функции пульта управления эмулятора КМУ:
Функции аутригеров
Выдвижение/ втягивание цилиндра (нефиксируется)
q/a
Аутригер со стороны основного пульта: балка/цилиндр опоры
w/s
Аутригер со стороны дополнительного пульта: балка/цилиндр опоры
e/d
Грузоподъемные функции
Поворот колонны: по часовой/против часовой
4/6
Движение первой стрелы
8/2
Движение второй стрелы
7/1
Функция телескопирования
9/3
Левая сторона пульта управляет аутригерами, правая сторона - основными грузоподъемными функциями манипулятора.
В середине пульта расположен кран переключения гидропотока между аутригерами и основными функциями.
(В демонстрационной версии кран-переключатель не задействован.)
Рычаги пульта, в зависимости от назначенной функции, автоматически возвращаются в нейтральное положение
при прекращении воздействия, или остаются в нужном положении после нажатия управляющей клавиши.
Включенный рычаг можно переключить в противоположное положение (соответствующей клавишей)
или вернуть в нейтральное положение повторным нажатием командной клавиши.
Возможно одновременное задействование различных функций.
При необходимости, изображение манипулятора может масштабироваться и перемещаться вдоль вертикальной
оси.
Масштабирование производится клавишами +-, перемещение - те же клавиши, но при удержании клавиши Shift.
Функции масштабирования/перемещения действуют только при активном пульте управления.
Пример управления манипулятором
Выдвижение аутригеров:
Работа с аутригерами выполняется аналогично реальному манипулятору: нужным рычагом активируется необходимая функция, затем
рычагом движения цилиндра производится выдвижение/втягивание нужного гидроцилиндра.
Подробный порядок управления манипулятором смотрите в РЭ на КМУ
- Активировать пульт управления (клик мышью)
- Открыть гидрозамки на опорах (в демо-версии не требуется)
- Проверить выключенное состояние функций пульта (все рычаги в нейтральном положении).
- Включить функцию выдвижение балки аутригера
- Нажать и удерживать рычаг выдвижения цилиндра до максимального выдвижения балки, затем отпустить его
- Выключить функцию выдвижения балки
- Включить функцию поворота опоры
- Повернуть опору в положение ВНИЗ рычагом выдвижения цилиндра.
- Выключить функцию поворота опоры
- Включить функцию выдвижения штока опоры
- Выдвинуть опору до касания опорной площадки
- Выключить функцию выдвижения штока опоры
- Повторить действия для аутригера с противоположной стороны КМУ
- Ориентируясь на пузырьковый уровень, отрегулировать горизонтальное положение КМУ (в демо-версии не требуется. Пузырьковый уровень не функционирует.)
- Закрыть гидрозамки на опорах (в демо-версии не требуется)
Особенности реализации грузоподъемных функций в симуляторе КМУ:
Возможно параллельное выполнение нескольких функций. В демо-версии ограничений на возможности гидронасоса не предусмотрено.
Функция телескопирования по окончании выдвижения первой секции выключается. Для начала выдвижения второй секции нужно
отпустить рычаг и нажать его повторно. Действия при обратном движении аналогичны.
Подробный порядок управления манипулятором смотрите в РЭ на КМУ
Подвесной рабочий орган показан схематично. Вертикальное положение определяется расчетным методом,
и может давать некоторые погрешности.
Возможности полнофункциональной версии:
- Симуляционная модель под любой конструктив манипулятора (Z-образные, L- образные, управление, телескопические секции, конфигурация стрел, приборы безопасности).
- Работа приборов безопасности.
- Динамическое отображение нагрузок в ключевых точках.
- Отображение текущих параметров: давление и температура гидравлического масла (параметры рассчитываются исходя из операций и окружающей температуры.)
- Имитация окружающего пространства.
- Работа с грузом.
- Строповка грузов.
- Контроль соударения с конструкциями автомобиля или окружающего пространства.
- Активные подсказки по оптимальным углам наклона стрел.
- Навесное оборудование - ротатор, грейфер, захваты, люлька.
- Строгий/нестрогий контроль порядка выполнения подготовительных операций.
- Выставление горизонтального положения при помощи основных/дополнительных опор и пузырькового уровня.
- Временные ограничения на выполнение задания преподавателя.
- Журнал операций обучающегося
- Адаптация под сенсорные экраны.
- Подключение управления на физический пульт, подключенный к ПК (отдельное изделие).
- Неограниченное количество учебных рабочих мест в классе.
- Практические задания: работа в ограниченном пространстве, работа с максимальными грузами, точные перемещения, работа в котловане и т.п.